|
|
|
Optimum Machine Design Here are some materials that are intended to help with
transferring existing TK Solver code into modeFrontier. This is done in order to
utilize the wide variety of optimization and data analysis tools that
modeFrontier offers. It also serves as a starting point for any further work on
integrating modeFrontier with the full complement of software used the
University of Idaho Mechanical Engineering Department. Workflow: TK Solver
à Excel
à modeFrontier
The basis of the optimization work
that follows is a workflow that was developed for a Capstone Design project
involving engine design, but is broadly applicable to any program that can be
written in TK Solver. In this example the optimization of a compression spring
for the minimization weight is being performed. The first step in this process
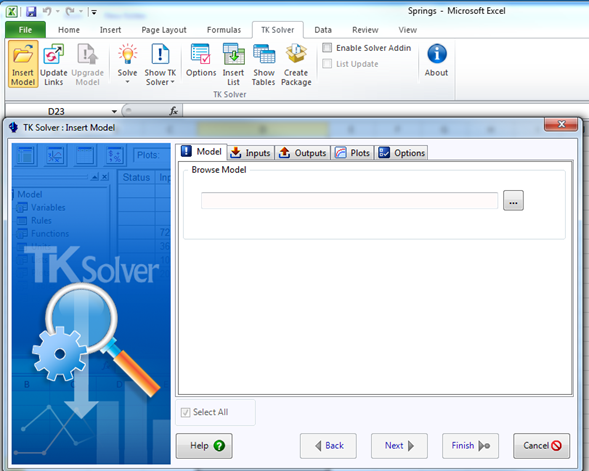
is exporting the TK Solver code into Excel. This is done in Excel through the TK
Solver tab located at the top of the interface. Then, after clicking the insert
model button the interface shown below will appear.
In this interface the proper TK Solver model is selected, and
any input and output variables pertinent to the desired optimization process are
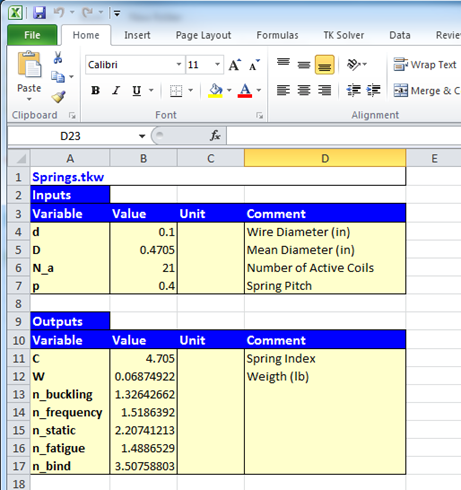
selected. This will then generate an Excel spreadsheet that will perform the
same function as the underlying model. This sheet will update after every change
to values in the input cells. An example of this Excel spreadsheet is shown
here.
Once the Excel workbook has been
tested to verify that it works correctly the process of building the
modeFrontier workflow can begin. Upon starting modeFrontier you will be given
the option to create a new project. This will create a blank page
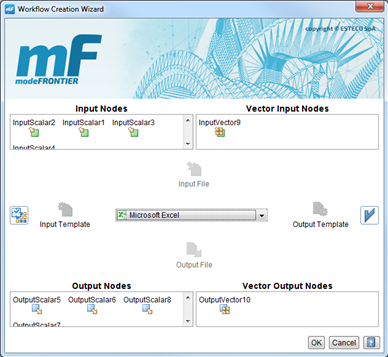
where any workflow can be created. For new users there is
also a better option available that is to use the Workflow Wizard. This allows
the user to quickly select inputs, outputs, and what software you would like to
interface with. After clicking OK a generic workflow will appear. This workflow
needs to be further customized for ease of use and functionality. To aid in
understanding of your workflow it is helpful to rename the inp
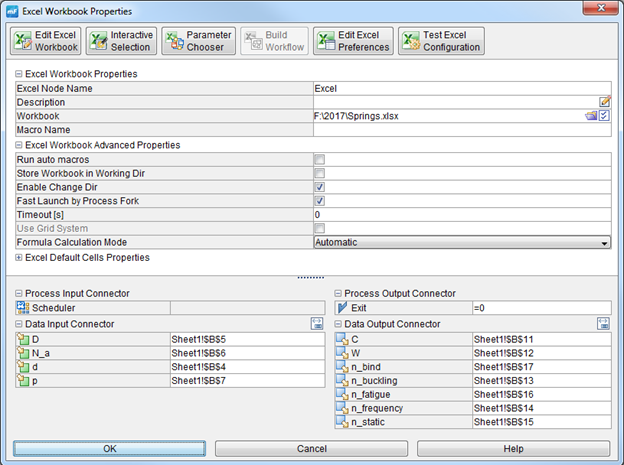
The final step for this setup is to properly configure the
interface between mode frontier and Excel. This is done by clicking on the Excel
node in the workflow. This will bring up the following interface where you
should first locate the correct workbook, and then properly input the correct
cell locations alongside the corresponding variables. Be very careful to follow
the format for cell locations exactly as shown below. Even if the workbook
contains only one sheet you must still clarify that the location is on sheet one
otherwise the input/output connection will not work properly.
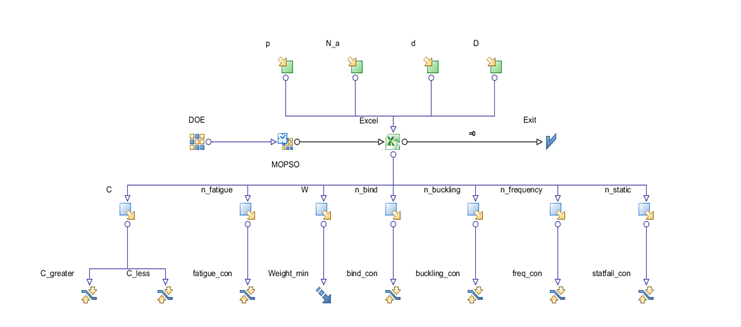
Once these steps have all been completed the model should
run any designs given by the DOE and scheduler. However, this is not enough
information to properly run an optimization. To optimize the design objectives
and constraints must first be configured. Objectives and Constraints
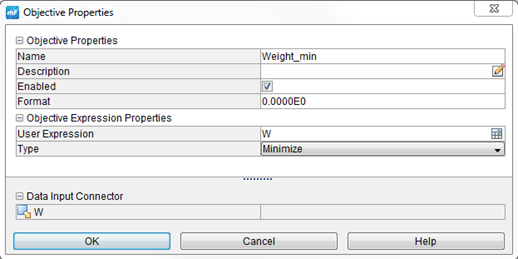
In modeFrontier there are multiple types of objectives that
each have unique purposes. The most common is simply called the objective. It
can be either the minimization or maximization of any function that the user
inputs. This function is entered in the user expression field, and must be
written with proper JavaScript syntax. This function is often just the name of
an output variable as is in the case shown where the weight calculated by TK
Solver is being minimized. The other type of objective that is commonly utilized
is the target value objective. When a target node is connected to an output
variable you can enter a target value that the optimization will attempt to
reach. There are also other types of objectives available for handling vectors
and other datatypes. More information on these can be found in the modeFrontier
user manual.
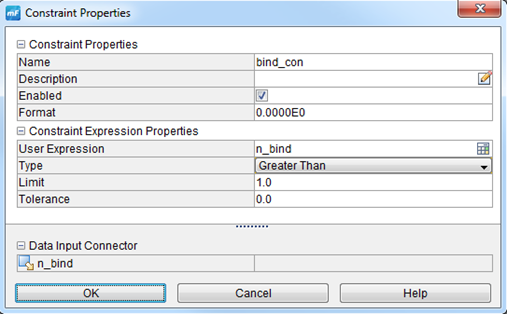
Sometimes it is useful to only look at data that meets certain
prescribed conditions. For example, in the spring design problem given it would
not make sense to consider designs that have safety factors of less than one.
The springs index must also be limited to a narrow range of acceptable values.
In both these cases the way to impose this limitation is with a constraint. This
constraint can be of greater than, equal to, or less than types, and like the
objectives accept any valid JavaScript expression. Constraints are only used on
outputs, if an input can only be within a certain range then that range can
simply be set in the input properties, and no designs outside that range will be
created. On the other hand, with a constrained output some designs will be
generated that fail to satisfy the constraint. In this case the designs will be
labeled as invalid, and the optimization algorithm will impose a penalty to
direct the generation of further designs away from those that violate the
constraint.
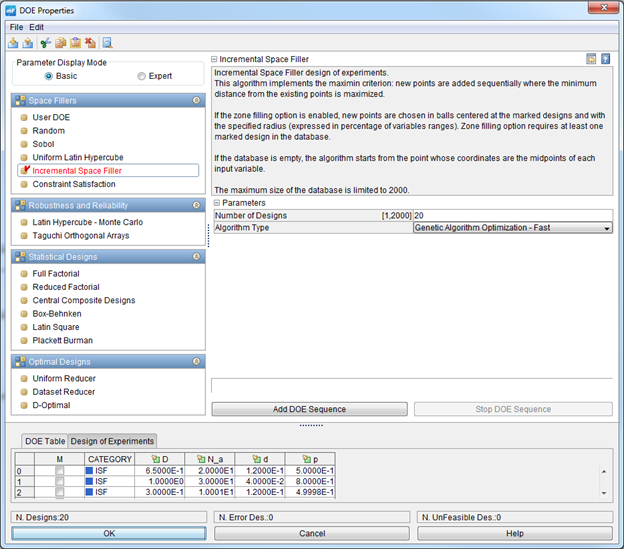
DOE and Scheduler
In modeFrontier both the DOE and Scheduler determine which
designs will be evaluated. The DOE provides the initial designs that will be
evaluated, and then the responses of those designs will be assessed by the
scheduler to generate new designs according to the chosen optimization
algorithm. The various types of DOEs available are shown below.
Unless the user is aware of where in the design space the
optimal design is located it is best to generate designs that are distributed
throughout the entire design space. These are broadly classified as space filler
DOEs. If each iteration of the problem is solved quickly then many data points
can be evaluated in a short amount of time. In this case random generating of
the DOE is acceptable, as the number of points generated should be high enough
that no clusters of points are apparent. If evaluating a large number of designs
is too time consuming, then the Incremental Space Filler or Uniform Latin
Hypercube DOEs will ensure that the designs are well distributed through the
design space. Finally, if you do have a known good design to start from you can
add it using the User DOE option. The Scheduler in modeFrontier is the optimization algorithm.
The options available are shown below, and the most commonly used types are in
the Evolutionary, Heuristic, Gradient-Based, Multi-Strategy categories. When to
use each type of algorithm is a complex subject that cannot be covered in this
quick overview. Documentation for each algorithm is provided in the user manual,
and for several algorithms research papers are provided. In general, it is
enough to know that a gradient-based algorithm will arrive at the answer
quicker, but will sometimes get stuck on a suboptimal design. In problems that
are poorly defined or have statistical variance in their output heuristic and
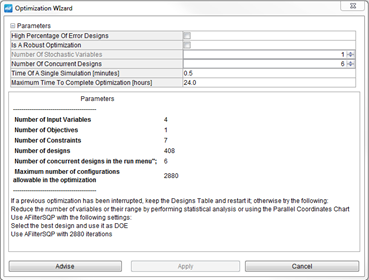
evolutionary algorithms generally perform better. At the top of the scheduler interface an optimization wizard
is provided that will help you determine the best algorithm to select based
primarily around the acceptable simulation time. This should provide a good
starting suggestion for most well-defined engineering problems.
Data and Analysis
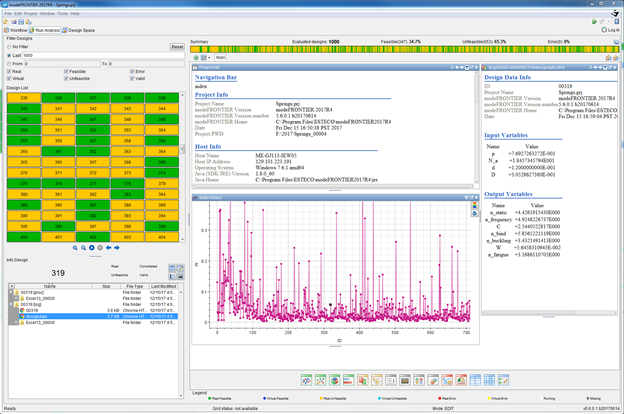
Once the workflow is properly setup it can be run from the Run
Analysis tab of the interface. An example of the output from a particle swarm
optimization for the compression spring weight minimization problem is shown. In
this case 1000 design evaluations were performed, and while several good designs
were quickly found the algorithm continued to explore the design space resulting
in unacceptable designs at all stages of the process. This is a characteristic
of all heuristic algorithms. A gradient based optimization of this problem was
also performed, and given the simple nature of the problem it was able to find
the optimal design with only 100 design evaluations.
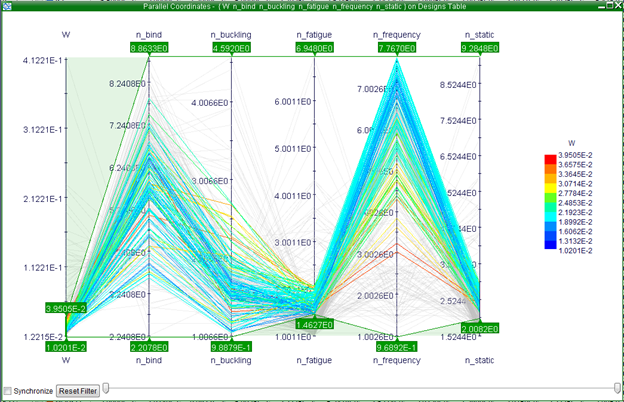
One of the more intuitive ways to sort through designs that
works well with multiple objectives is the Parallel Coordinates Chart. This
chart traces designs through the corresponding variables, and then allows a
filter to be applied to each variable. This allows the user to decide which
designs are acceptable, and by selecting any of the curves the exact run number
can be determined. Other methods for design selection are included in
modeFrontier such as Multi-Criteria Decision Makers which evaluate designs based
on weights assigned to each objective. These are suitable when the importance of
each design aspect is known, but this is often not the case. Because of this a
graphical method such as the Parallel Coordinates Chart or a pareto frontier
displayed on a graph for two and three-dimensional problems is often preferred.
Best Practices
The process of creating optimum designs is not always as
simple as throwing a large amount of computing power at the problem. Often an
answer will be found quicker and easier if more thought is put into the problem
formulation. More thought on the side of problem formulation also makes results
easier to interpret and design objectives for. One example of this is that it is
often easier to create safety factors for all aspects of the design. With this
approach all constraints are simply become that the safety factors must be
greater than one. Observation of the outputs form your model is critical to
figure out if it is running properly and to determine whether it will converge
to an optimum design. A good understanding of the underlying principles is
necessary so that the desired outputs can be predicted. If the model does not
perform as expected double check the configuration of the objectives and the
interface with any external solvers as this is often the source of errors. If an evolutionary or heuristic algorithm is used multiple
designs can be evaluated simultaneously. This option is available in the run
options for the scheduler. For these types of algorithms set the number of
concurrent designs equal to the number of physical processor cores that the
computer has. This will greatly increase to number of designs that can be
evaluated within a given time. Finally, this is only a short guide and cannot provide
solutions for all possible issues. It is in the best interest of all users to
read every section of the manual pertaining to the type of work that the are
undertaking.
|